





Sensors 2024, 24(9), 2824; https://doi.org/10.3390/s24092824 (registering DOI) - 29 Apr 2024
Abstract
The temperature and strain fields monitoring during the preparation process of buoyancy materials, as well as the health status after molding, are important for mastering the mechanical properties of buoyancy materials and ensuring the safety of operators and equipment. This paper proposes a
[...] Read more.
The temperature and strain fields monitoring during the preparation process of buoyancy materials, as well as the health status after molding, are important for mastering the mechanical properties of buoyancy materials and ensuring the safety of operators and equipment. This paper proposes a short and high-density femtosecond fiber Bragg grating (fs-FBG) array based on different temperature coefficients fibers. By optimizing the parameters of femtosecond laser point-by-point writing technology, high-performance fs-FBG arrays with millimeter level gating length and millimeter level spatial resolution were prepared on two types of fibers. These were successfully embedded in buoyancy materials to achieve in-situ online monitoring of the curing process and after molding. The experimental results show that the fs-FBG array sensor has good anti-chirp performance and achieves online monitoring of millimeter-level spatial resolution. Intelligent buoyancy materials can provide real-time feedback on the health status of equipment in harsh underwater environments. The system can achieve temperature monitoring with an accuracy of 0.56 °C and deformation monitoring with sub-millimeter accuracy; the error is in the order of micrometers, which is of great significance in the field of deep-sea exploration.
Full article
(This article belongs to the Special Issue Fiber Grating Sensors and Applications)
►
Show Figures
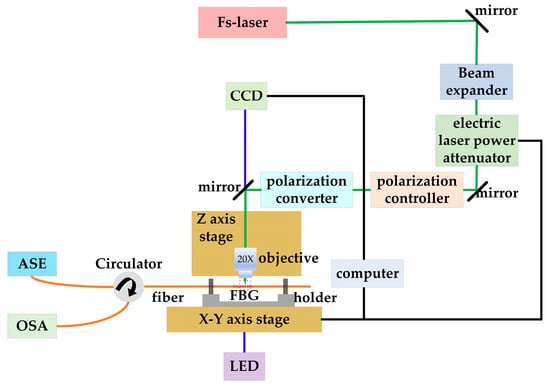
Figure 1







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}